
Overview














CISCOR is dedicated to world class research in its 3 overlapping areas of emphasis: Robotics, Control, and Intelligence. No center can perform research in all areas related to its specializations. Instead it must carefully choose to make contributions that fit the background and aspirations of its key researchers. Below we briefly describe some of the major problems to which CISCOR has chosen to contribute.
+ Robotics
Robot Mobility in Complex Environments
Mobile robots easily move on flat, uncluttered, man-made surfaces. However, as the environment becomes more complex, robot mobility and the intelligence that is needed for autonomous mobility becomes more challenging. Complexity is manifested in a variety of ways. It can involve cluttered environments or multiple-terrain surfaces some of which are elevated and some of which are inherently challenging (e.g., mud, sand or piles of rubble). Space also offers unique challenges such as zero friction, which means that a collision with another object at rest can cause it to move indefinitely if the object is not actuated.
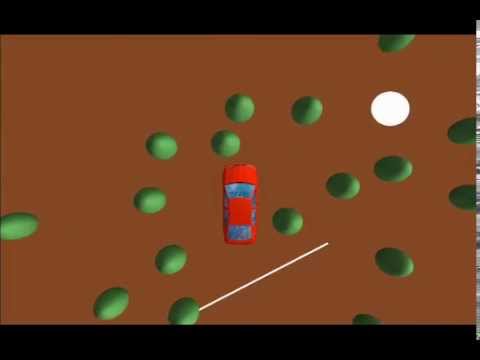
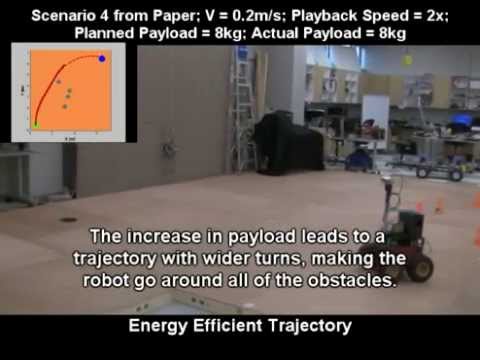
In line with the challenges outlined above, CISCOR research focuses on the design and modeling of legged robots, which have inherent advantages over wheeled robots on natural terrains and any terrains (e.g., trees and walls) that require climbing. Another major thrust is the development of planning technology for mobile robots, both wheeled and legged. This technology enables energy efficient mobility of robots moving in cluttered or multiple terrain environments, the traversal of steep hills (i.e., hills for which a robot can only decelerate due to gravity and the limitations of the motors or engine) or the dual problem of manipulators lifting heavy loads, and mobility of spacecraft in cluttered environments.
A related thrust area is automated terrain classification so that a robot can sense either upcoming terrain or terrain that it is currently traversing. The sensors used can be an inertial measurement unit (IMU) and the accompanying linear and rotational acceleration and velocity measurements, a vision sensor such as a laser line striper, or a robot skin that has dense pressure measurements.
It is generally recognized that robots moving in complex environments may sometimes require supervision by a human. To accomplish two-way communication with a human who may also be moving requires a simple and robust human interface. Hence, another thrust area is the development of human-robot interfaces using smart glasses.
For more details:
+ Controls
Adaptive Nonlinear Model Predictive Control
Model Predictive Control (MPC) is one of the most widely used results from optimal control. It has the ability to achieve optimal tracking while enforcing constraints on the system inputs and outputs. Furthermore, it uses a model to predict the system behavior to possible control inputs, which enables it to accommodate delays in the system and base present control decisions on anticipated future behavior. Limitations of MPC have been due to two primary factors: 1) when the plant is nonlinear the optimization techniques can tend to converge to local minima, which might severely limit performance; and 2) MPC can be computationally intensive which can limit application to fast systems.
Our research tackles the limitations of MPC by using an optimization paradigm that is distinct from the typical Newton-type methods that rely on gradients and Hessians (or their approximations). Input sampling (a form of problem discretization) is used to form a growing graph and the optimal path on the graph is found using the A* algorithm that is well known in the Robotics and Artificial Intelligence planning literature. This optimization paradigm ensures that if the optimization horizon is not limited, the optimization algorithm will converge to the global minimum of the graph created by sampling, which in practice is very often close to the actual global minimum. It also relies on a cost-to-goal function (often referred to in the literature as a heuristic) that can be learned, which helps the algorithm to typically achieve 1 to 2 orders of magnitude improvement in computational speed and also enables the development of an anytime algorithm such that the best solution in a fixed time period is given.
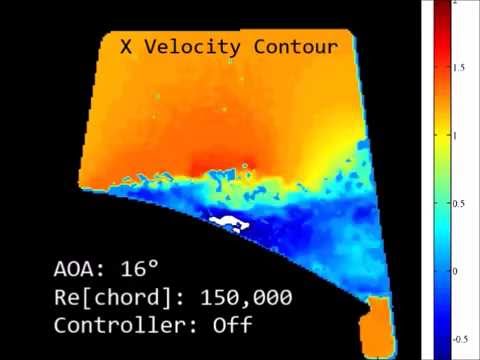
While MPC has numerous potential applications, our focus has been on using it for problems in flow control, power system control, energy system control, and automotive engine tuning.
For more details:
+ Intelligent Systems
Task Allocation for Cooperative Agents
In problems that involve cooperative agents (e.g., robots or the a mixed team of humans and robots) given the mission of accomplishing specific tasks, it is important to determine how to distribute the tasks among the agents. This is a combinatorial problem that is NP-hard. Hence, this research develops algorithms for approximate optimal task allocation. An important part of this research is the development of distributed algorithms that do not require complete communication between the agents and are robust with respect to a single failure.
Object Classification
Principal Component Analysis (PCA) is a major paradigm for the development of algorithms for object classification. This research has focused on the development of more computationally efficient PCA-based object classification algorithms and algorithms that enable the classification of occluded objects.